
Когда происходит утечка газа в большом здании или на промышленной площадке, пожарным приходится прибегать к помощи газоизмерительных приборов, что занимает много времени и не безопасно.
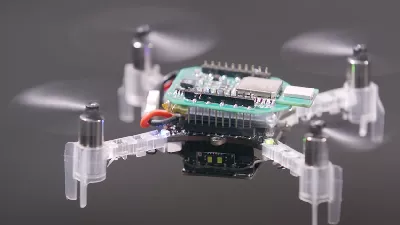
Исследователи из Делфтского технического университета (Нидерланды), Университета Барселоны и Гарвардского университета разработали рой крошечных и безопасных дронов, которые могут автономно обнаруживать источники утечки газа даже в загроможденных помещениях.
Автономный поиск источников утечки газа - сложная задача. Датчики искусственного обоняния менее чувствительны, чем носы животных, поэтому требуется особый алгоритм поиска чтобы обнаруживать даже небольшое количество газа и оперативно реагировать на изменения его концентрации. Кроме того, среда, в которой находится газ, может быть сложной (состоящей из смеси нескольких газов). Поэтому большая часть исследований, выполненных ранее в этой области, была сосредоточена на автономных роботах, которые ищут источник газа в относительно небольших, беспрепятственных условиях, где эту работу легче выполнить.
Однако, из-за того, что дроны очень малы, сложно снабдить их высокочувствительными датчиками и искусственным интеллектом, необходимыми для автономного поиска источника утечки газа. Более того, работа в рое сопряжена со своими проблемами, поскольку дроны должны обнаруживать друг друга, чтобы избежать столкновений и работать совместно. Проблема была решена с помощью стратегий навигации и поиска, вдохновленных биологическими объектами.
В природе существует много примеров успешной навигации при поиске источников запаха в рамках строгих ограничений ресурсов.
Так, например, плодовые мухи с их крошечным мозгом, состоящим из ~ 100 000 нейронов, безошибочно обнаруживают варенье. Они делают это быстро, сочетая простые действия при разных направлениях полета относительно ветра, в зависимости от того, чувствуют ли они запах. Хотя исследователи не могли напрямую копировать это поведение из-за отсутствия датчиков воздушного потока на дронах, им обеспечили такое же простое поведение, чтобы справиться с поставленной задачей.
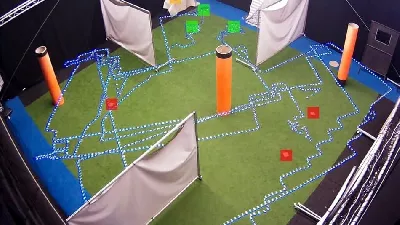
Маленькие дроны снабжены новым «алгоритмом насекомых» для навигации, который называется «Sniffy Bug». Пока датчики не «почувствовали» запах газа, дроны максимально рассредоточены по площади, избегая при этом препятствий и столкновений друг с другом. Если один из дронов обнаруживает газ, он передаст информацию об этом другим. С этого момента дроны будут работать совместно, чтобы как можно быстрее найти источник газа. Затем рой ищет максимальную концентрацию газа с помощью алгоритма, называемого «оптимизация роя частиц» (PSO), где каждый дрон действует как «частица». Первоначально этот алгоритм был смоделирован на основе социального поведения и перемещений птичьих стай.
Это исследование показывает, что стаи маленьких дронов могут выполнять очень сложные задачи. Но необходима дополнительная работа для превращения этого типа технологии в полностью работающий продукт. Пока еще в полной мере не исследовано трехмерное движение, чтобы определить местонахождение источников утечек газа на переменной высоте, а также необходимо дополнительно повысить надежность навигации, прежде чем дроны можно будет развернуть в условиях реальной чрезвычайной ситуации.
Однако текущий результат обнадеживает. Разработанные алгоритмы могут использоваться не только для обнаружения утечек газа в зданиях, но и для научных задач, например, обнаружение метана на других планетах, или бизнес-приложений по обнаружению болезней или вредителей в теплицах.
Источник: naukatehnika.com
Все права защищены.
Полное или частичное копирование материалов Сайта в коммерческих целях разрешено только с письменного разрешения владельца Сайта.
В случае обнаружения нарушений, виновные лица могут быть привлечены к ответственности в соответствии с действующим законодательством Российской Федерации.