



Сбер представил на международной конференции AI Journey четыре робота: двух аниматроников и двух ассистентов. Устройства с ИИ-технологиями разработаны в Центре робототехники Сбербанка и предназначены для выполнения различных задач.
Робот-аниматроник Куба предназначен для изучения алгоритмов ходьбы и динамического равновесия и тестирования технологий машинного обучения. По данным Сбера, сейчас он может пройти сто метров, задача разработчиков — научить его ходить идеально.
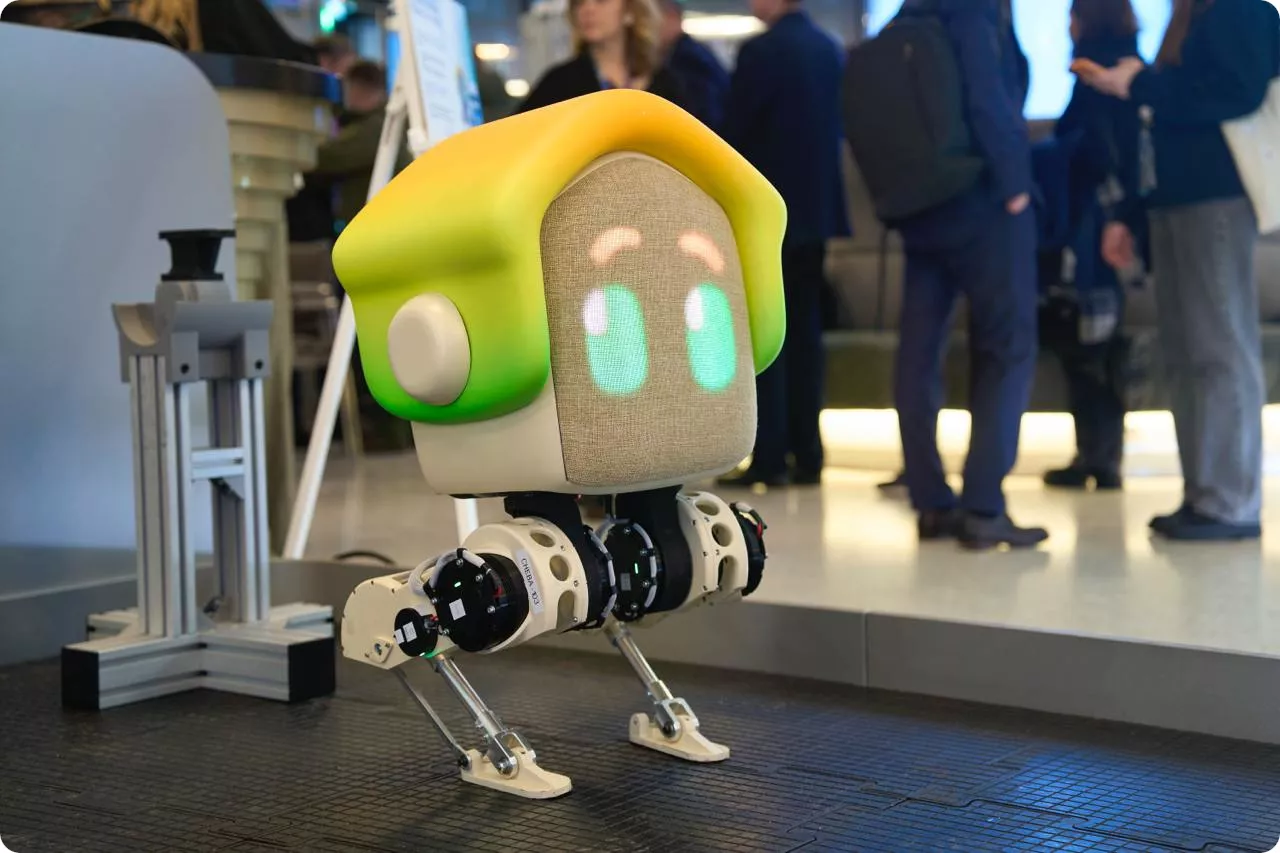
Робот Топа, напоминающий избушку на курьих ножках, пока делает первые шаги, а в дальнейшем будет бегать, прыгать и танцевать. Его дизайн был разработан с помощью специалистов «Союзмультфильма», а над голосом трудилась команда SberDevices. Музыкальные партии были созданы нейросетью SymFormer.
Также на AI Journey показали двурукого робота-помощника Краба, который управляется с помощью ИИ-технологии, основанной на архитектуре диффузионного трансформера (Embodied AI). Эта технология объединяет машинное обучение, компьютерное зрение и робототехнику и позволяет роботам действовать в реальном мире без заранее заданных инструкций. Сейчас робот умеет убирать вещи со стола и сортировать их по контейнерам. При этом вещи на стол могут добавляться произвольно, и робот самостоятельно спланирует траекторию своих «рук», чтобы взять эти предметы и положить их в контейнер. Краб работает в двух режимах: с ИИ-интерфейсом и в режиме управления человеком.
Ещё один представитель семейства — робот Слон. Он оснащён ИИ-моделью для понимания запросов и их выполнения, например, переноса предметов в ёмкость. Он может поговорить, так, на просьбу выполнить задачу он ответит: «Без проблем, сейчас сделаю». При этом Слон понимает, что он может сделать, а что нет. Модуль планирования Слона, основанный на большой языковой модели, разработан в Центре робототехники Сбера, и формирует действия, основываясь на запросах и данных с камер.
Кроме этого, впервые на AI Journey совместно с МФТИ был представлен алгоритм управления для робособаки, способной выполнять паркурные трюки, включая преодоление преград, превышающих её рост. Для этого ей необходимо заранее распознать тип преграды и спланировать действия. Алгоритм разработан при помощи методики End-to-End Reinforcement learning: сначала цифровой двойник робособаки преодолевал препятствия в симуляции, а затем алгоритм перенесли в реального робота. В итоге ИИ-модель принимает решения, учитывая данные с камер и датчиков, для успешного преодоления препятствий.
Источник: habr.com
Все права защищены.
Полное или частичное копирование материалов Сайта в коммерческих целях разрешено только с письменного разрешения владельца Сайта.
В случае обнаружения нарушений, виновные лица могут быть привлечены к ответственности в соответствии с действующим законодательством Российской Федерации.